fisheyeang
The fisheyeang function creates \vartheta, \rho and \Omega angle matrices with equi-angluar projection (as used in LUMOS) for a given fisheye image resolution.
Usage:
[theta, rho, omega] = fisheyeang(reso,hor_angle)
Where:
| Parameter | Description |
theta | Is the returned rotation angle matrix in °. |
rho | Is the returned tilt angle matrix to the optical axis (image center) in °. |
Omega | Is the returned pixel-wise solid angle matrix in sr. |
reso | Defines the image resolution, default: 500 \times 500 pixel. |
hor_angle | Defines the horizontal opening angle, default: 180° |
Examples:
Create \vartheta, \rho and \Omega angle matrices with default settings:
[theta, rho, omega] = fisheyeang; contourf(rho,[0:10:90]) colorbar axis equal off
Result:

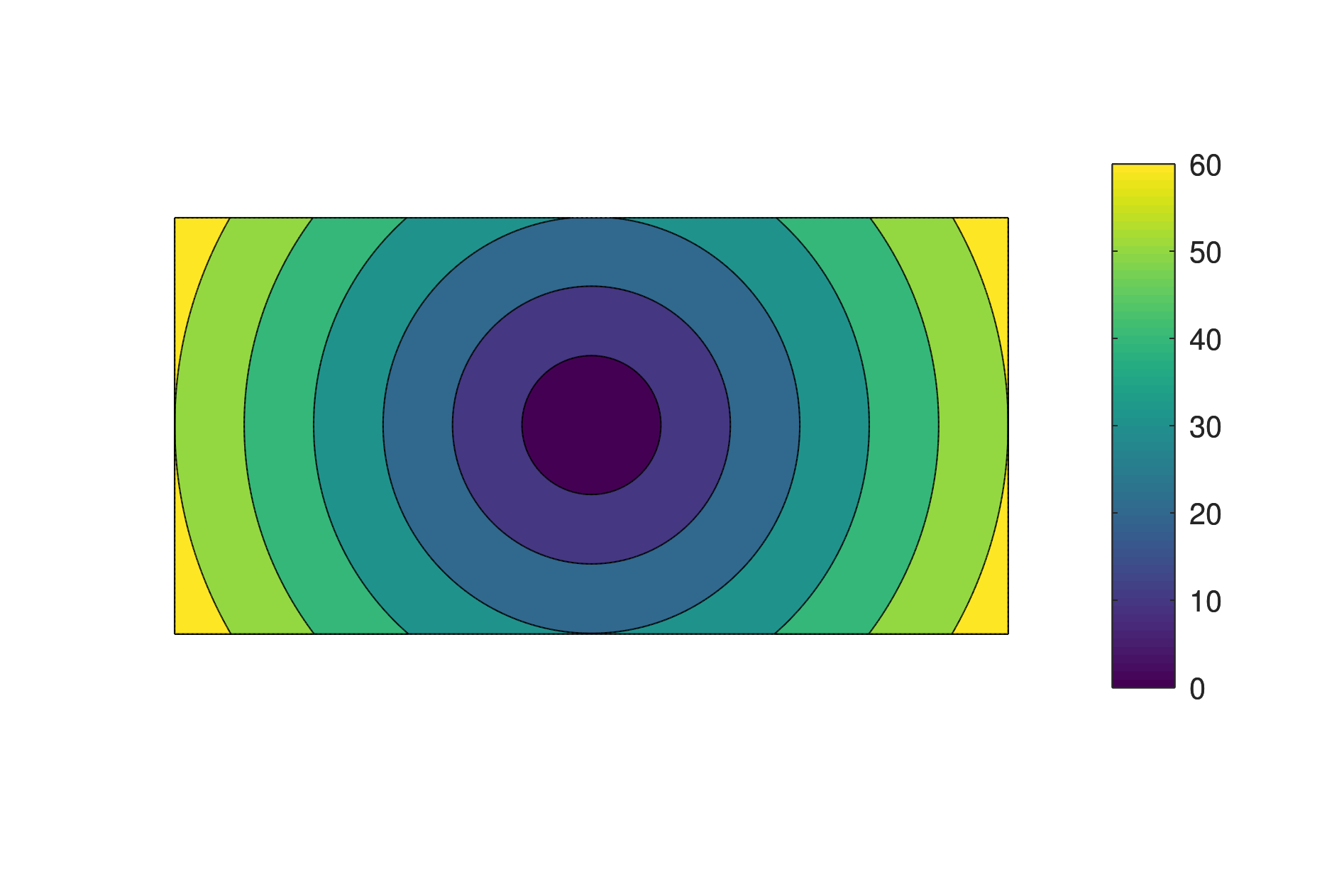
Create \vartheta, \rho and \Omega angle matrices with resulting resolution of 500 x 1000 pixel and 120° horizontal opening angle:
[theta, rho, omega] = fisheyeang([500 1000],120); contourf(rho,[0:10:90]) colorbar axis equal off
Result: